
|
|
|
|
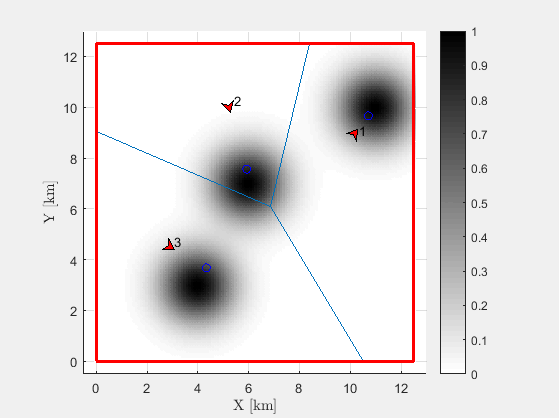
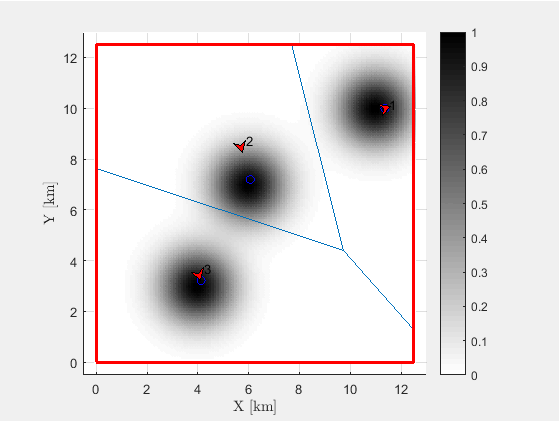
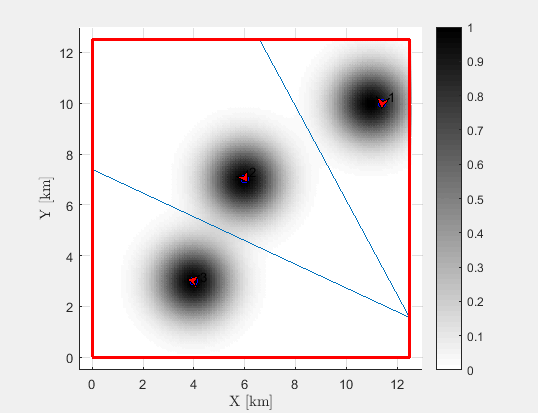
| Simulation of a set 2-dimensional area with 3 agents navigating to maximize coverage among 3 density regions. | |||
|
|
|
|
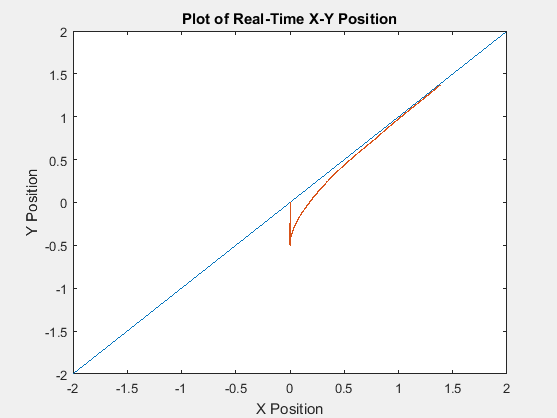
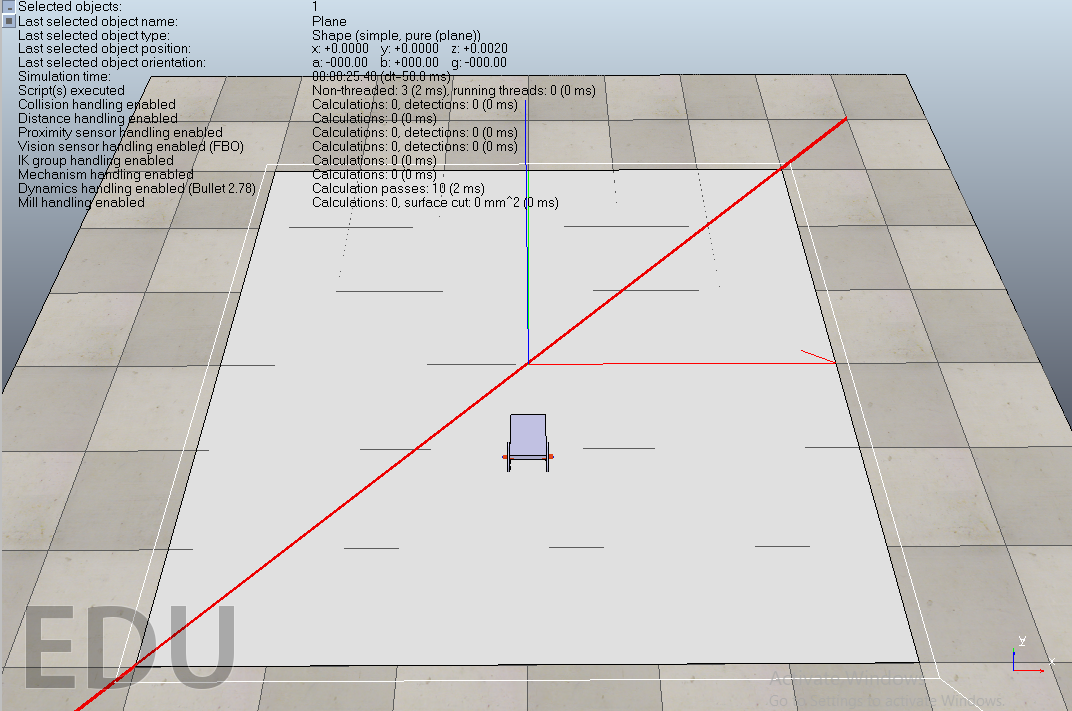
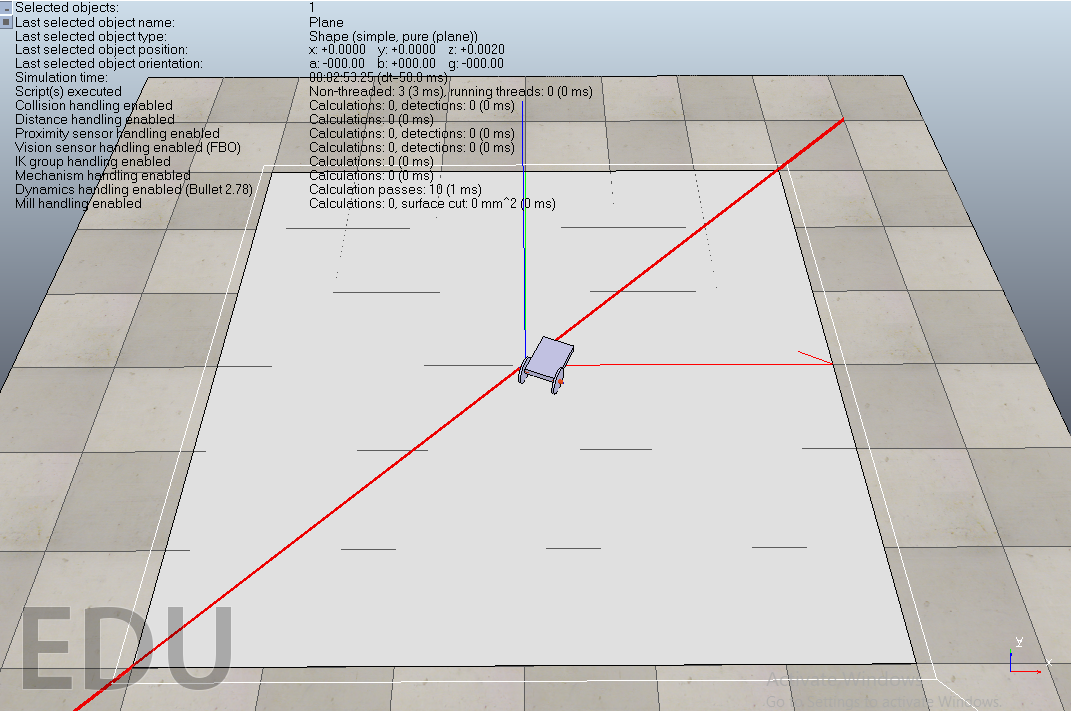
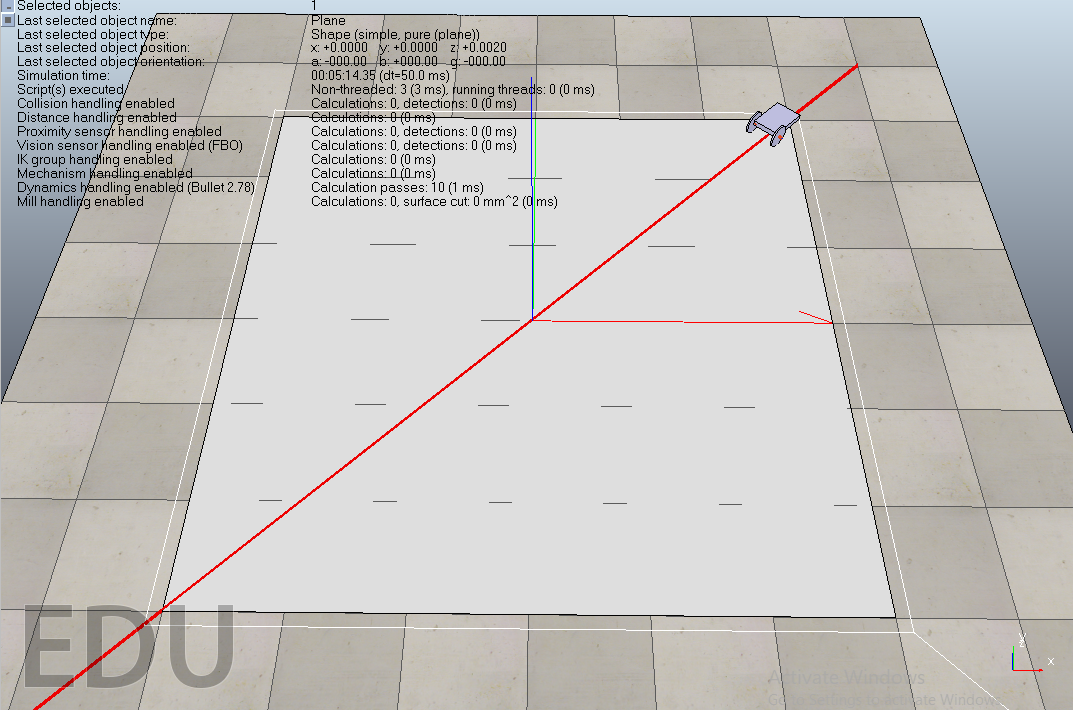
| Using the framework described in the proposal we simulate a simple line following algorithm in VREP with a corresponding Matlab plot. | |||
|
|
|
|
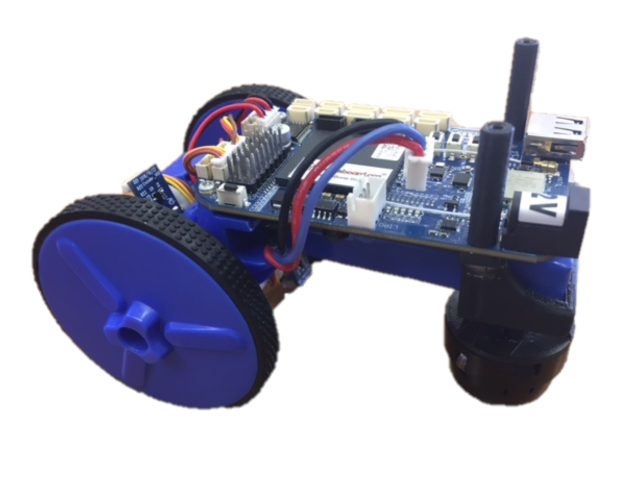
| The Pioneer, modified EDU-mip, and Khepera IV robots used the current project. | |||