The Competition. |


The Competition. |
The CompetitionThere were 51 teams competing in the competition. Each robot was sequestered while the other robots were completing their runs. Shown below is over 15 of the competitors robots in the sequestration area.
There were 3 preliminary rounds where the total points from each round were added together to make a team's total score. The teams with the highest scores would advance onto the final round.

Troubleshooting at the Competition
The night before the competition, teams had the opportunity to access the competition arenas to test their robots before the competition the following morning. During this time, we realized that several changes were necessary. For example, we had to ram the wall at Task 2 because the servo was not powerful enough to activate the vibration sensor in the lightsaber. Also, adjustments were made to navigation to improve the accuracy. The modular design we chose proved most useful at this stage.

Rounds were run four robots at a time so the competition could progress through the 51 competing teams as quickly as possible. Between each round, teams had 30 minutes to make any adjustments necessary to gain more points on the following round.
|
The TeamTeam members Daniel Hofstetter, Kendall Knapp, and Brian Roskuszka were able to travel to Charolette, North Carolina with their advisers Dr. Ahn and Dr. Lu on March 30th, 2017 for the competition. Team member Cameron McSweeney and adviser Dr. Wang offered support from back in Peoria.

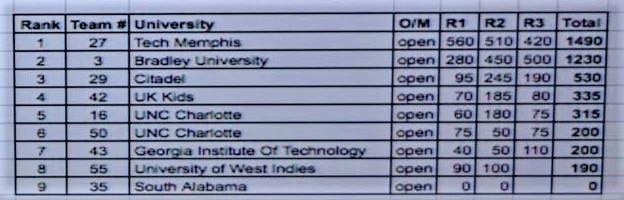
Competition ResultsOur team managed to earn 9th place overall out of the 51 teams competing at the competition. In the open division, we placed 2nd. This was definitely an exciting honor, and we were recognized during the awards banquet the evening after the competition.
On each of the 3 competition rounds our robot earned more points than on the previous run. This was a direct result of the corrections we were able to make with the modular design of our robot. The figure below shows our scores for the 3 rounds in our division.
We were presented with a certificate during the awards banquet.
We also got to meet one of Dr. Malinowski's professors from his college days, Dr. Jacek M. Zurada, the IEEE 2018 President-Elect. It was appropriate, considering that without Dr. Malinowski's teaching we would not know how to program Atmel microcontrollers, which are the brains of our robot.

|