Executive summary Deliverables Simulation Results Experimental Results Plan For Future Work
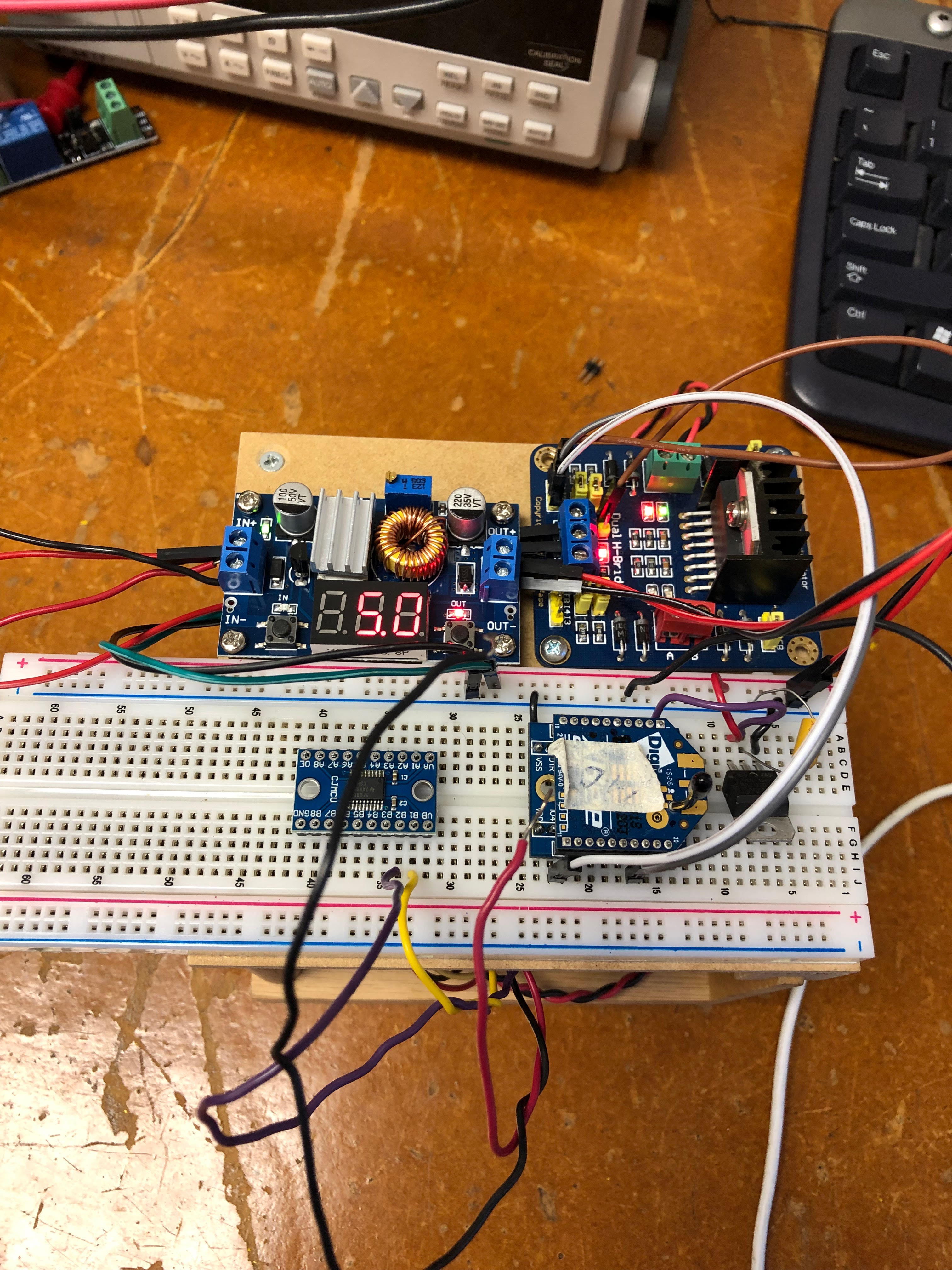
This is a picture of the motor that we have been working with. We have attached an h bridge as well as a buck/boost convertor in order to use a single power supply to power everything. Within the breadboard we have the receive zigbee which receives the signal sent by the transmitter connected to the raspberry pi. This in turn powers the H-bridge to move the motor in whatever direction specified
.
This is a picture of us using BEMOSS to turn a light on and fof. The plug for the lightbulb is connected to a WeMo switch which has been linked to BEMOSS. Because the WeMo switch has been linked to BEMOSS, we are able to control if the switch is on or off, in turn controlling the light. The switch and the BEMOSS server are both connected to a router with no access to the outside world. The server sends a signal to the router and the router send a signal to the WeMo switch to turn on or off depending on what we want to do. The WeMo switch also provides us data on power consumption that we will be utilizing in the future with our algorithim