Figure 8
These results were gathered using Matlab.
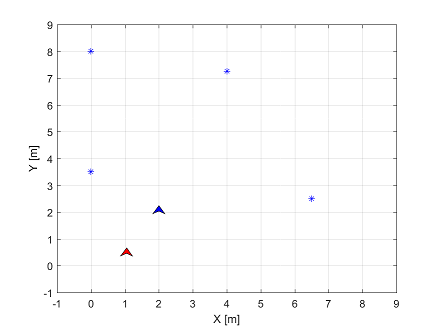
Initial Position at t=0 seconds.
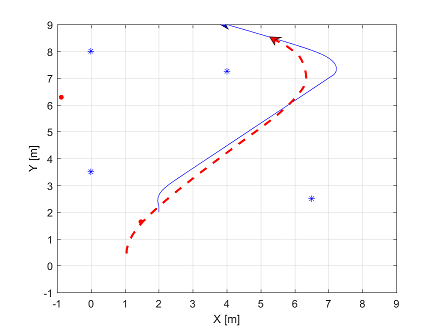
Position at t=25 seconds.
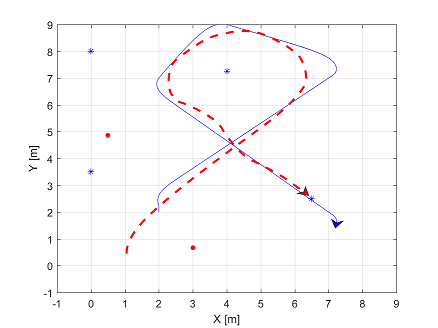
Position at t=50 seconds.
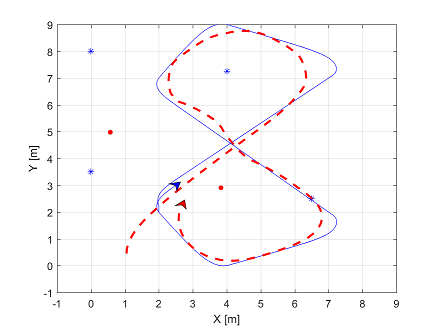
Position at t=75 seconds.
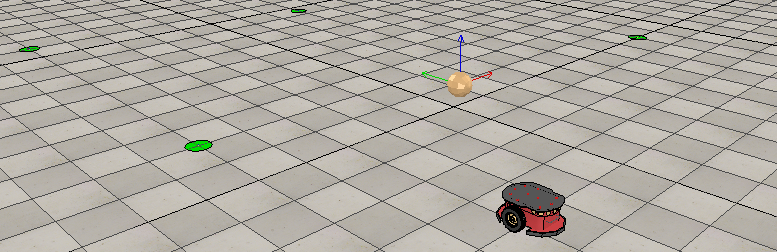
The preliminary experiments were conducted using the commercial robotics simulator V-REP (Virtual Robot Experimentation Platform).
These results were gathered using Matlab.
Initial Position at t=0 seconds.
Position at t=25 seconds.
Position at t=50 seconds.
Position at t=75 seconds.