The Simple Pendulum
The
movement of the payload once the crane comes to a standstill can be explained through the
movement of a simple pendulum. Below, you can see the force diagram for a simple
pendulum. At the end of this analysis, we would like be able to see how quickly
![]() decreases with time.
decreases with time.
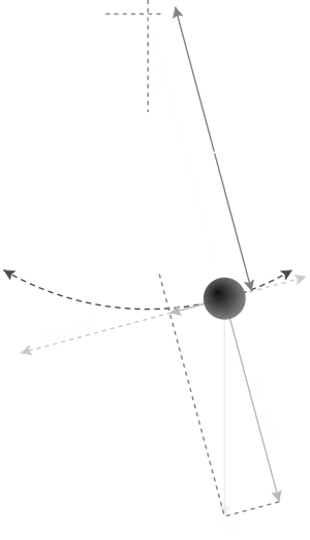
First, we sum up the forces in the x and y directions as shown below
Y-Direction X-Direction
![]() Eq. 1
Eq. 1
 Eq. 2
Eq. 2
Where...
F: Force [N]
m: mass of the payload (or pendulum for this example) [kg]
L: length of the rigid rod that connects the payload to the crane cart [m]
g: gravitational constant equal to 9.81 m/s^2
a: linear acceleration [m/s^2]
s: arch length [m]
where![]() [m]
[m]
![]() : angle of
deflection [rad]
: angle of
deflection [rad]
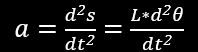
Then, we solve Eq. 1 for a.
![]() Eq. 3
Eq. 3
Substituting Eq. 3 into Eq. 2 we get our final ODE (ordinary differential equation):
![]() Eq. 4
Eq. 4
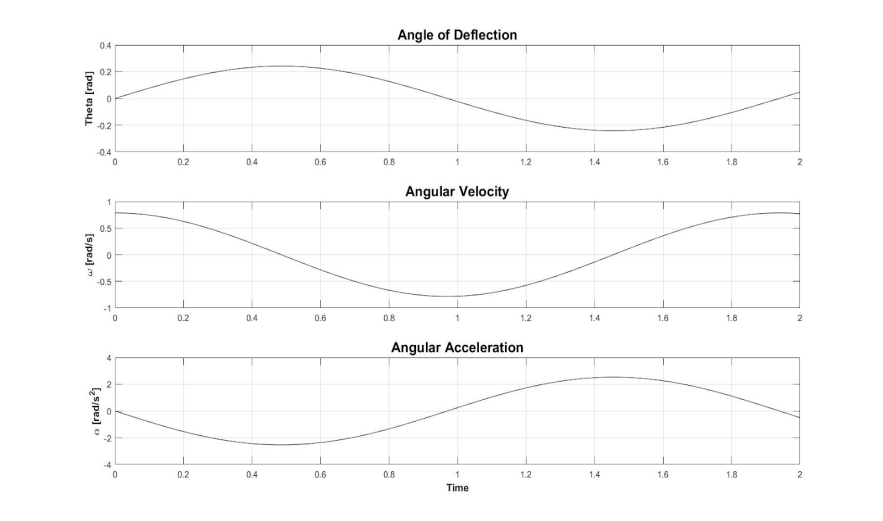
The results shown below were
obtained using MATLab to solve the ODE listed above. The intitial condition used
was
![]() =pi/6. L was
chosen to be
0.9906 m.
=pi/6. L was
chosen to be
0.9906 m.
There are many ways to solve ODEs.
As you can see above, there is no decay in
![]() . This is because there is no
damping included in our equation (such as friction or air resistance). Commonly,
those studying physics will add a dampening term into the normal pendulum
equation to get a damped response. However, the damping term added will assume
small angle approximation, the rod is massless, and also that air resistance is
constant. For a real pendulum, the rod mass will have an impact and air
resistance could change depending on wind conditions.
. This is because there is no
damping included in our equation (such as friction or air resistance). Commonly,
those studying physics will add a dampening term into the normal pendulum
equation to get a damped response. However, the damping term added will assume
small angle approximation, the rod is massless, and also that air resistance is
constant. For a real pendulum, the rod mass will have an impact and air
resistance could change depending on wind conditions.
Below is an example of a damped pendulum equation. The only thing changed was the solution ODE as shown.

There is no 'good' theoretical way to determine what this dampening condition is equal to. Therefore, the only valid model for this application would be the simple pendulum. However, the simple pendulum is too simplified to analyze the full situation.