The Cart and Pendulum
Now that a pendulum has been analyzed, the analysis can be expanded to determining what affect the pendulum weight has on the cart while the pendulum is swinging. Due to concervation of energy, the cart will move in the opposing direction of the pendulum while the pendulum is swinging. This is similar to the spring cart and pendulum analysis common in physics. However, the spring in this model will be removed since a motor will be used for this project to move the cart rather than a spring.
Using equations developed by Denis Kartachov, the analysis for the cart and pendulum model become easy. These equations listed below have been altered to include friction caused between the rigid rod and the cart in addition to the friction already included for the cart and rails.
![]() Eq. 1
Eq. 1
![]() Eq. 2
Eq. 2
 Eq. 3
Eq. 3
 Eq. 4
Eq. 4
Where...
x: cart displacement [m]
v: cart velocity [m/s]
⍵: angular velocity of pendulum [rad/s]
Mp : mass of pendulum [kg]
Mc : mass of cart [kg]
g : gravitational constant
(9.81 m/s^2)
μc : friction coefficient between cart and track
μp : friction coefficient between rigid rod
and cart
Below, you can see the solution to these equations as solved by MATLab. This simulation was run before a controller was implemented.
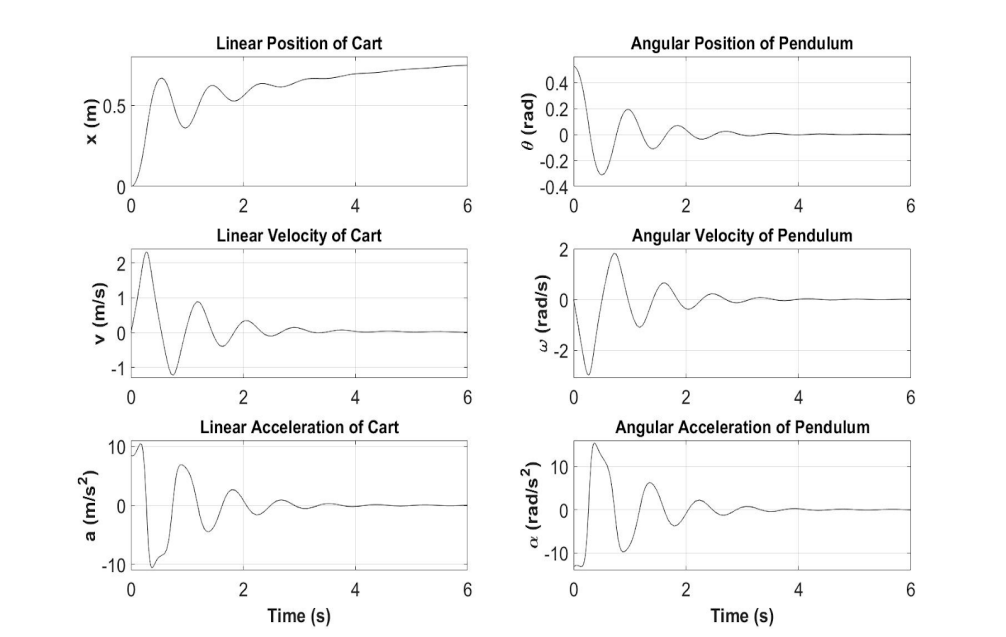
Notice how as the displacement of the cart increases, it's
speed slowly decreases to 0. This minimizes
![]() and forces it to 0 as well.
Below you can see a simple animation of how the pendulum reacts to the cart's
movement.
and forces it to 0 as well.
Below you can see a simple animation of how the pendulum reacts to the cart's
movement.