Design of a Simulink Based Control Workstation for Mobile Wheeled Vehicles with Variable-Velocity Differential Motor Drives
Schedule and Progress Updates
Project Progress as of December 8, 2015
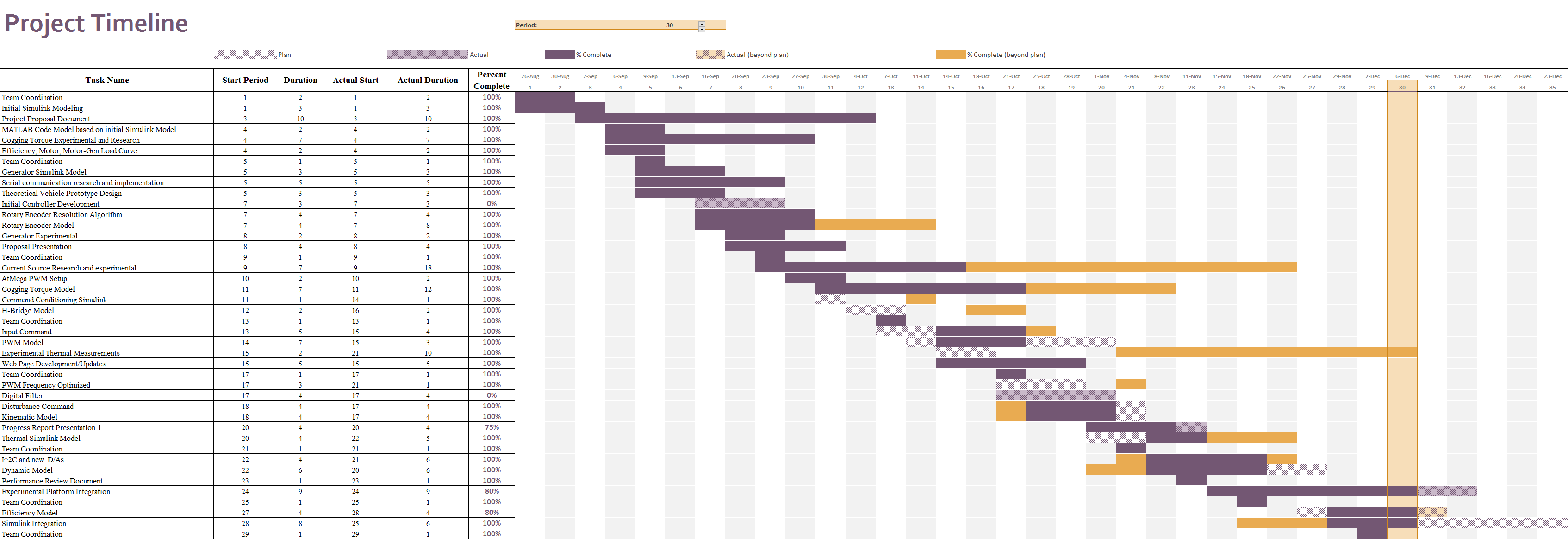
Click the Gantt chart above to see an expanded view.
Alternatively, download a PDF version or an Excel version of the complete current Gantt chart.
Progress Update
The team has completed a lot of work over the last week. Timothy De Pasion has completed a redesign of the rotary encoder model and has completed Simulink integration two and a half weeks ahead of schedule. Next week he will be working on controller development. Alexander Schmidt has completed his experimental thermal runs on the motor. This includes the unloaded and loaded motor tests. He has also created the second H-Bridge that will be needed for the second motor. Next week, Alexander will be working on fixing the Simulink thermal model, as well as heat sink calculations for the H-Bridge. In conjunction with Benjamin Roos and Tim, Kevin has successfully integrated a single motor-generator set into the experimental platform. Once the platform is ready to be assembled integration of the experimental platform will be complete. Due to the fact that the platform will not be ready until after Winter Break, Kevin will soon begin work on the GUI development. Benjamin will also begin the vehicle controller development in the coming weeks.
Return to current progress update.