Design of a Simulink Based Control Workstation for Mobile Wheeled Vehicles with Variable-Velocity Differential Motor Drives
Schedule and Progress Updates
Project Progress as of December 1, 2015
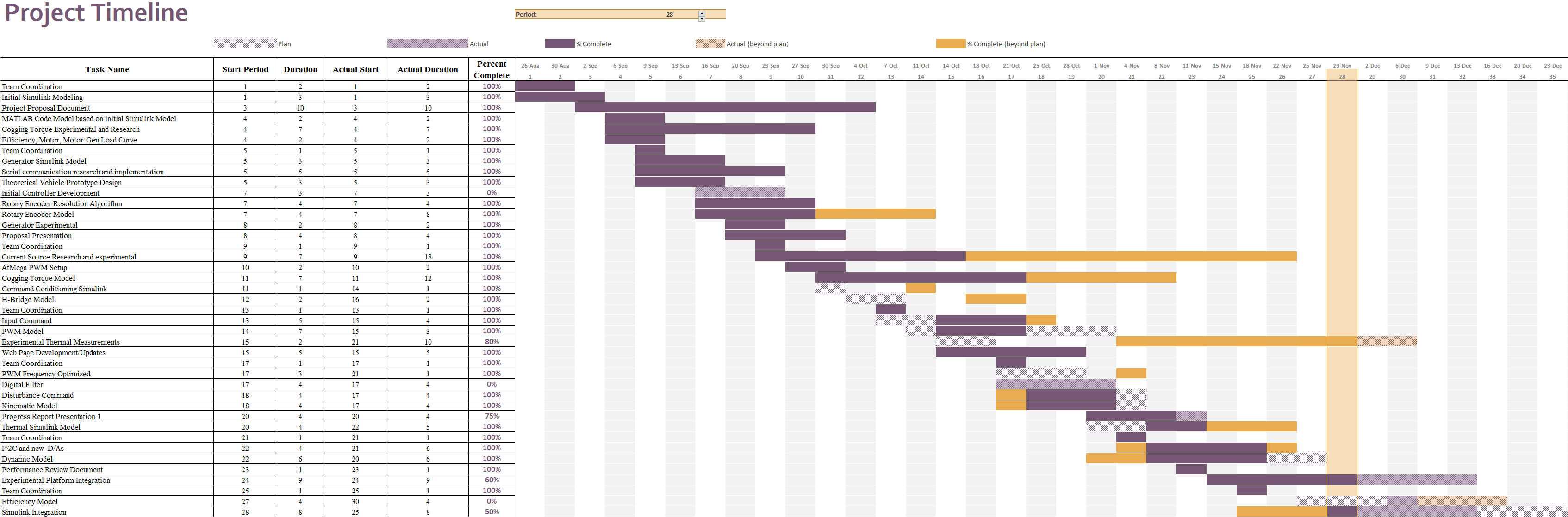
Click the Gantt chart above to see an expanded view.
Alternatively, download a PDF version or an Excel version of the complete current Gantt chart.
Progress Update
The team has completed a lot of work this week. Timothy De Pasion worked on the integration of the Simulink system. He sped up the simulation time of the model 100 fold. Next week he will continue working on integration of the Simulink system and the testing of it. This week Kevin began experimental platform integration by implementing the rotary encoders. He began this task with research on quadrature encoding and eventually implementing this encoding method with the external interrupts. Next week Kevin will continue the integration. Alexander Schmidt has created the second H-Bridge. He has also updated his simulink thermal model to incorporate the internal motor thermals. Within the next week Alexander will do loaded experimental thermal measurements, as well as H-Bridge testing. Benjamin has began integrating his progress into the experimental platform by constructing both generator current control circuits. In the next week, he will assist Alexander with loaded thermal motor measurements and work with Kevin to ensure torque disturbance outputs from the microcontroller interface properly with the current source circuit inputs.
Return to current progress update.