Design of a Simulink Based Control Workstation for Mobile Wheeled Vehicles with Variable-Velocity Differential Motor Drives
Schedule and Progress Updates
Project Progress as of November 17, 2015
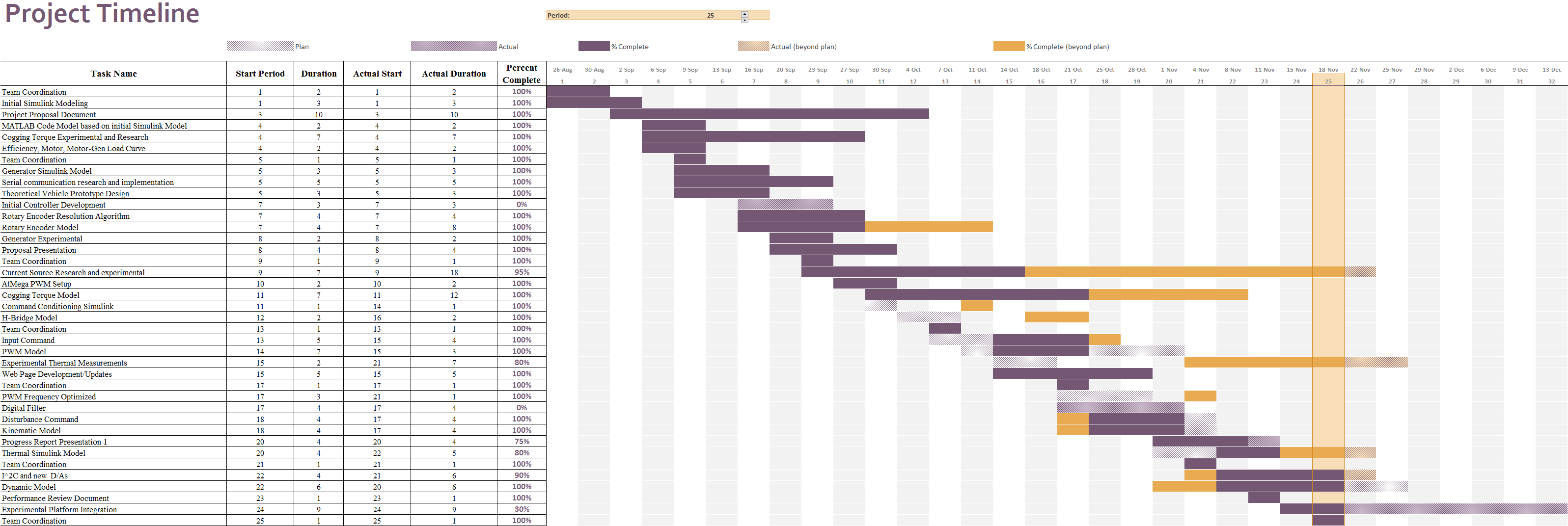
Click the Gantt chart above to see an expanded view.
Alternatively, download a PDF version or an Excel version of the complete current Gantt chart.
Progress Update
The team has made great amount of progress this week. Timothy De Pasion has completed the dynamic model for the theoretical vehicle ahead of schedule by one week. Next week he will begin integration of the experimental platform and Simulink system. Kevin Block has established I2C communication; however, he has encountered some issues with the timing of digital to analog converter. Kevin will continue to work towards a solution to this issue and once the issue has been resolved he will begin integrating the experimental platform with Tim and Ben. Alexander Schmidt has completed his thermal Simulink model. He has also set up his thermal experimental work bench. He will be able to verify the the thermal Simulink model once the experimental setup has been done. Next week Alex will be able to run the experimental thermals on the motor. Benjamin Roos has researched controller compensation strategies for stabilizing the current source and torque disturbance input circuit. Within the next week, he will choose and implement a final control strategy for the circuit and begin integrating it into the experimental platform.
Return to current progress update.