Design of a Simulink Based Control Workstation for Mobile Wheeled Vehicles with Variable-Velocity Differential Motor Drives
Schedule and Progress Updates
Project Progress as of November 10, 2015
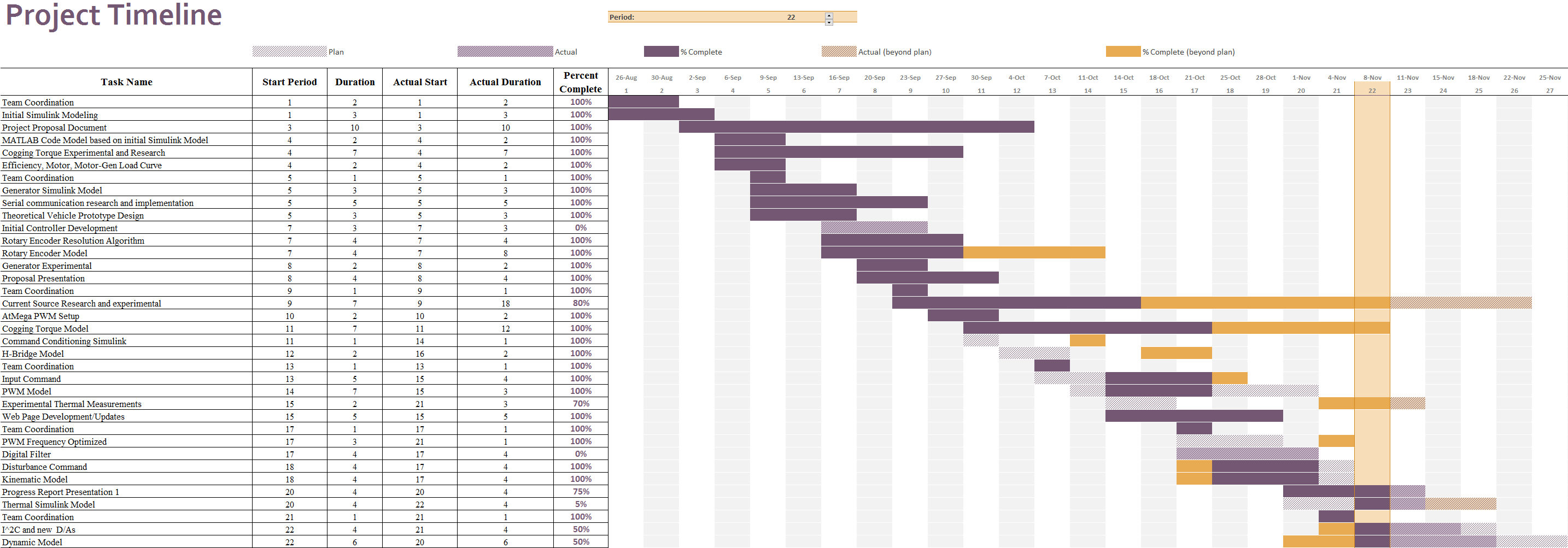
Click the Gantt chart above to see an expanded view.
Alternatively, download a PDF version or an Excel version of the complete current Gantt chart.
Progress Update
The team has made a lot of progress over the last week. Timothy De Pasion has completed optimization of the PWM frequency, which he took so Alexander could focus on modeling cogging torque. He also began research for the dynamic model. Over the next week Timothy will research more about dynamic vehicle models and begin the dynamic Simulink model. Kevin Block has begun I2C integration with the digital to analog converters ahead of schedule. He will continue the integration throughout this week. Next week, Kevin will begin incorporating the I2C communication with the one millisecond controller interrupt. Alexander has finished his cogging torque model and simplified the model. He has been doing thermal measurements of the motor case, but has been running into problems with the readings. He will continue working on it until he finds readings that seem more viable. On top of that, he is working on the Simulink thermal model to get back on track. Benjamin Roos has proven functionality of the generator current source model used in series with the motor-generator set itself. He has estimated the plant model for the circuit, which has proven to be unstable, and will be developing a compensator to stabilize the circuit in the next week.
Return to current progress update.