Design of a Simulink Based Control Workstation for Mobile Wheeled Vehicles with Variable-Velocity Differential Motor Drives
Schedule and Progress Updates
Project Progress as of November 3, 2015
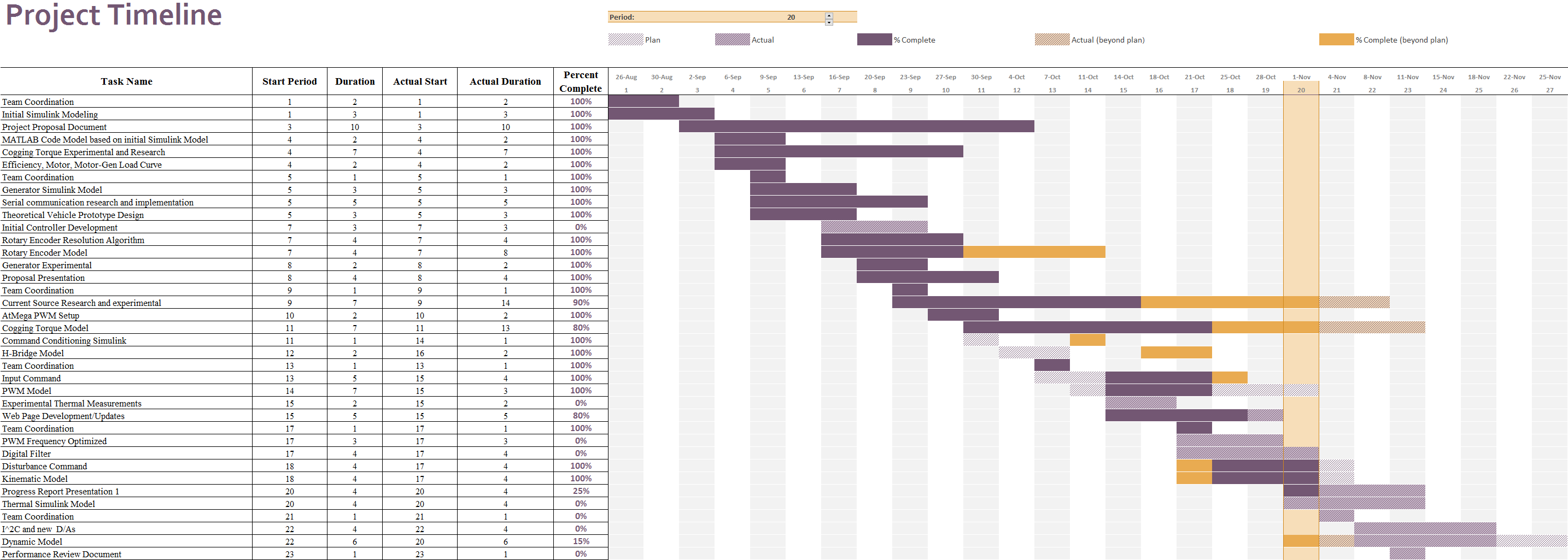
Click the Gantt chart above to see an expanded view.
Alternatively, download an Excel version of the complete current Gantt chart.
Progress Update
Over the last week each of the four team members has made progress in their tasks. Timothy De Pasion has completed the theoretical kinematic vehicle model ahead of schedule. In the next week, he will begin research on the theoretical dynamic vehicle model. Kevin Block successfully automated communication between MATLAB and the ATmega128 as well as began establishing I2C communication with the digital to analog converters. Next week he will continue to work on the I2C communication. Alexander Schmidt worked on acquiring motor values such as coulomb friction, viscous friction, the torque constant and the back-emf constant. Next week Alex will finish up his cogging torque model, and begin taking thermal readings from the motor. He will also begin work on PWM (Pulse Width Modulation) frequency optimization. Benjamin Roos demonstrated functionality of the generator current source and control circuit with purely resistive loads and began designing a test to demonstrate functionality of the circuit in series with the generator itself. Next week, he plans to carry out such testing and begin correcting any current control circuit instability.
Return to current progress update.