Design of a Simulink Based Control Workstation for Mobile Wheeled Vehicles with Variable-Velocity Differential Motor Drives
Schedule and Progress Updates
Project Progress as of October 27, 2015
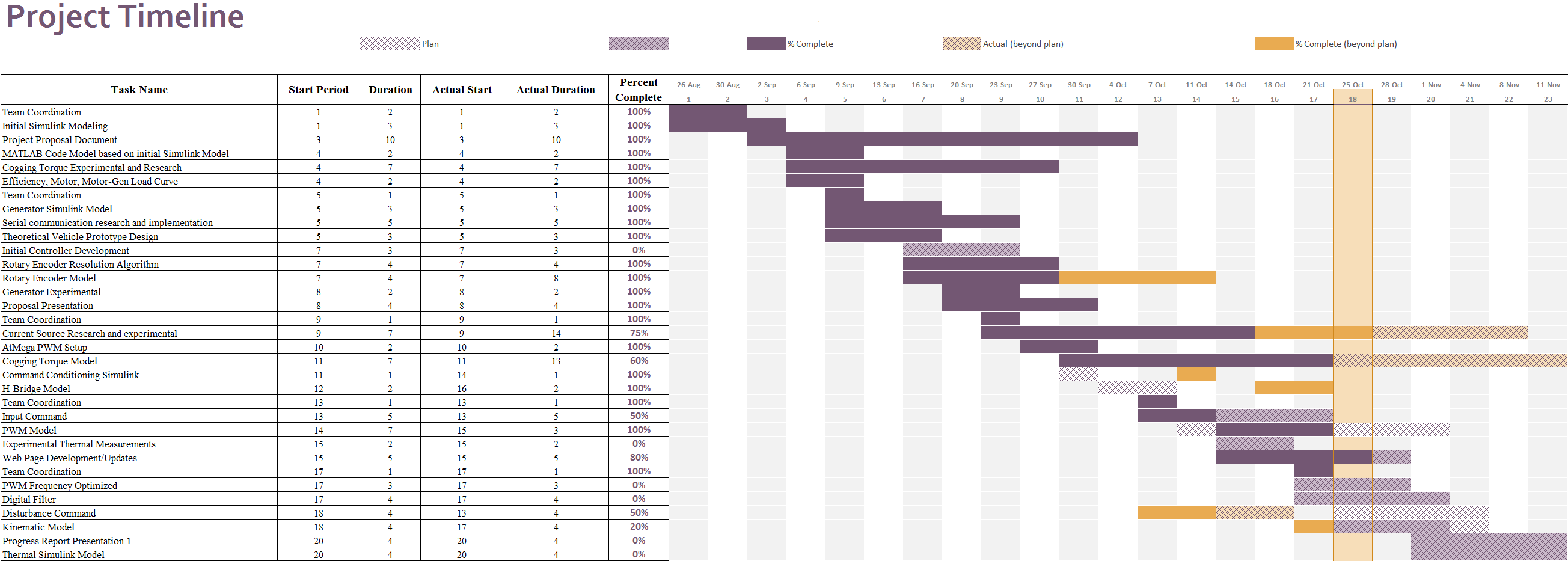
Click the Gantt chart above to see an expanded view.
Alternatively, download a PDF version or an Excel version of the complete current Gantt chart.
Progress Update
Each of the four team members has made progress on different components of the project over the last eight weeks. Kevin Block has worked on setting up the microcontroller such that it is ready for the control algorithm. This effort involved creating pulse-width modulation code and serial communication research and implementation. Over the next few weeks, he will work on communication between MATLAB® and the microcontroller. Timothy De Pasion has been working on modeling various physical components in Simulink®. He has completed the modeling of the rotary encoder, H-Bridge, pulse-width modulation, and the command conditioning block. Over the next couple lab periods, he will work on a theoretical kinematic vehicle model. Benjamin Roos has been working on the generator model and the current source that will be used to control it. He has completed a model of the generator in Simulink and has tested the generator experimentally. Over the next couple weeks, he will be completing the current source design and testing how effective it is in powering the generator used for torque disturbances in the experimental platform. Alexander Schmidt has been working on modeling the motors in Simulink. This work involves modeling nonlinearities such as cogging torque. He has completed the experimental measurements of cogging torque using current probes and has an initial model of cogging torque in Simulink as a lookup table. Over the next few lab periods, he will work on testing the cogging torque model and begin optimization of the pulse-width modulation frequency.
Return to current progress update.