
Cooperative Control of Heterogenous Mobile Robots Network
Cooperative Control of Heterogeneous Mobile Robots Network
Cooperative control of mobile robots has
been a rapidly growing area of research and development for industry
and academia during the past years. This growing area of research is
inspired by cooperative systems found in nature, such as a flock of
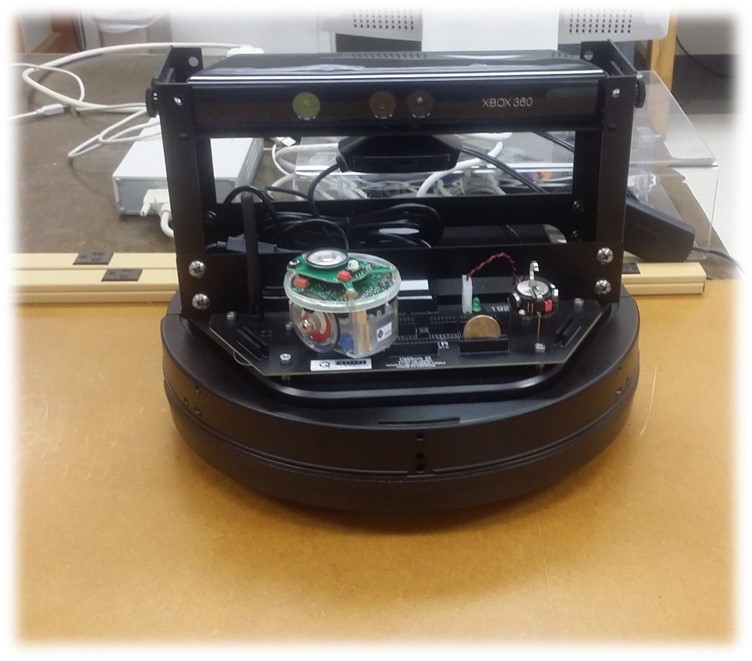
birds or a swarm of insects. In this project, the objective is to
design and implement cooperative control algorithms using three
different types of robotic platforms. With the proposed cooperative
control structure, several tasks are performed autonomously by
robots in the group, which include point convergence, trajectory
following, formation control, and heading convergence. The
completion of the tasks is based on the consensus of the robot group
through local information exchange. MATLAB was used to perform
simulations of different control structures, and determine how large
amounts of robotic agents interact with one another. The
applications of cooperative control strategies for heterogonous
mobile robots network are significant and far reaching. This
technology would find applications particularly in the intelligence,
surveillance and reconnaissance (ISA) in both military and civilian
missions.
Problem Statement
The development of cooperative based control
solutions allows for the improvement of mobile robots network.
Cooperative control strategies should permit for the best use of
available information to produce positive emergent behaviors. The
desired behaviors from the control methods are self-organization and
self-steering. Implementation of cooperative control strategies
should be done on a group of heterogeneous mobile robots. Each robot
agent must have the ability to communicate with any other robot
agent within the network, but the highest level of communication
must be performed locally, not globally. Individual robots will have
communication, sensor, and movement limitations, which will produce
uncertainties in the network. These uncertainties must be overcome
for the network to exhibit optimal performance. To summarize, the
goals of the project are as follows: the mobile robots network
should exhibit self-organization and self-steering behaviors, the
ability to detect objects and communicate among different robot
platforms. Not only must the robots achieve these behaviors, they
must also have algorithms that are easily portable to different
robot platforms.
.