Project Overview
Problem Statement:
The primary aim of the Team OBSCENE(on board self-governed computer engaging in nautical events) is to design, build, test, and operate an autonomous surface vehicle (ASV) that will contend in the 8th annual RoboBoat competition, an annual event sponsored by the Association for Unmanned Vehicle Systems International (AUVSI) and co-sponsored by the Office of Naval Research (ONR). The ASV must meet all constraints set by the AUVSI and the Department of Electrical & Computer Engineering at Bradley University. The ASV should be lightweight, durable, and efficient. The ASV will attempt to compete in and complete as many tasks and missions as possible. These tasks and missions are set forth in the 2015 RoboBoat’s rules. Historically, the tasks are designed to demonstrate and test the strength, speed, and control of the ASV. The missions are set by the AUVSI months before the competition. Traditionally, the missions have consisted of thermal and visual recognition, locating shore based targets, and finding and pressing a correct button based upon a specific environmental setup. Recently, the competition has shifted focus to more software driven missions (e.g. underwater light identification, acoustic beacon positioning, automated docking, obstacle avoidance). Points are accrued for each challenge attempted. The maximum point total for each mission is achieved only by completing the task. Winning the competition is the ultimate goal of the RoboBoat project. Robotics is a rapidly developing area of Electrical Engineering. In an aquatic environment, autonomous robots show great potential for use in marine research, emergency situations, and military fields.
RoboBoat Competition:
The RoboBoat Competition is an annual event held by the AUVSI
(Association for Unmanned Vehicle Systems International) Foundation
and co-sponsored by the ONR (Office of Naval Research). Teams
receive points for attempting or completing missions and a winner is
named when the competition is complete. This event occurs in
Virginia Beach, Virginia during June or July. The ASV proposed in
this document will be designed to satisfy the guidelines of the
AUVSI competition, while also being a robust, versatile platform.
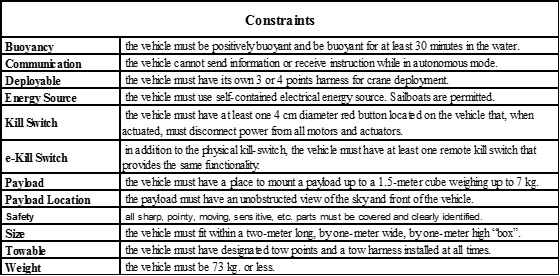
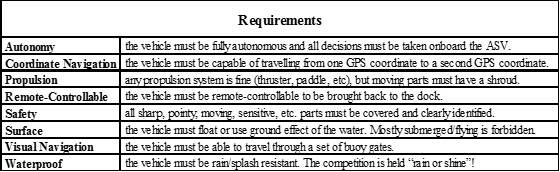
The design constraints and requirements of this system are taken
from the AUVSI constraints, as shown in Table 1 and Table 2 of the
PDF attachment. In Table 1, column one lists the constraints and
column two lists the description associated with each constraint. In
Table 2, column one lists the requirements and column two lists the
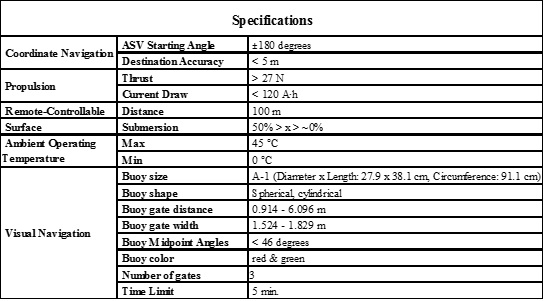
description associated with each requirement. The specifications of
the final system, which will be presented to the Bradley University
ECE Department in the spring of 2015, are shown in Table 3.
RoboBoat 2015 Website:
RoboBoat 2015
Table 1.
CONSTRAINTS OF THE AUTONOMOUS BOAT PLATFORM
Table
2.
REQUIREMENTS OF THE AUTONOMOUS BOAT PLATFORM
Table
3.
SPECIFICATIONS OF THE AUTONOMOUS BOAT PLATFORM
Previous Bradley University RoboBoat Competitors:
2012 Team NASTI
|
 |
2013 Team NASTI
|
 |