Our project is featured in one of Bradley University's "In the Spotlight" article
Objective Statement:
Autonomous vehicles have become of increasing interest with
defense
research. The Defense Advanced Research Projects Agency
(DARPA) has
held its Grand Challenge and Urban Challenge in 2004, 2005,
and 2007.
These competitions have set some of the most elite schools
against one
another in a competition to build a fully autonomous
vehicle. Recently
Google has also announced its “Google Driverless Car”; a
fleet of full scale autonomous cars which have logged over
300,000
hours completely accident free. If an autonomous vehicle
were to
become available on the market, then it would have far
reaching
benefits; from increasing road safety to allowing those with
physical
and vision disabilities to drive. For the Smart Autonomous
Vehicle in a
Scaled Urban Environment (SAV-SUE) project, the team will
bring the
concept of an autonomous vehicle to a small scale.
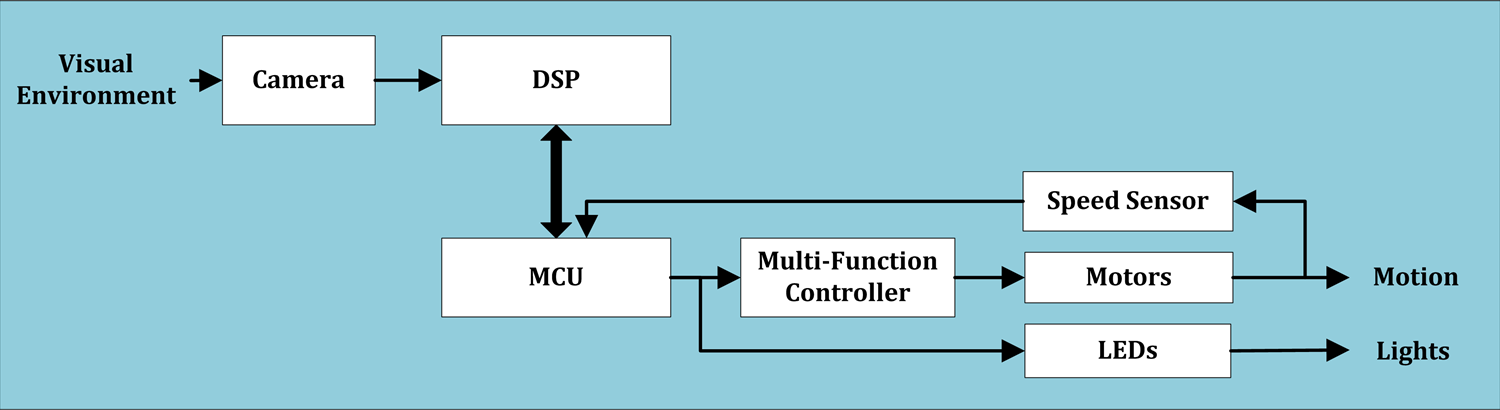
Fig 1: Overall System Block Diagram
SAV-SUE will integrate environment detection via a camera input and a digital signal processor (DSP) for image processing with microcontroller-based vehicle control. Fig. 1 illustrates a high level system block diagram for the system. The camera will be mounted in the cab mimicking a driver’s vision unless the size of the vehicle dictates otherwise. The camera will send signals to the DSP to determine the environment. The DSP will interface with the primary controller which will be a microcontroller. Sensory information will also interface with this primary controller. The primary controller will communicate with the vehicle’s Multi-Function Unit Controller (MFU), which will operate the motors and lights to achieve the desired actions of the vehicle. This vehicle will be the Tamiya MAN TGX 26.540 6x4 XLX replica-quality semi truck cab, built to a 1/14-scale.