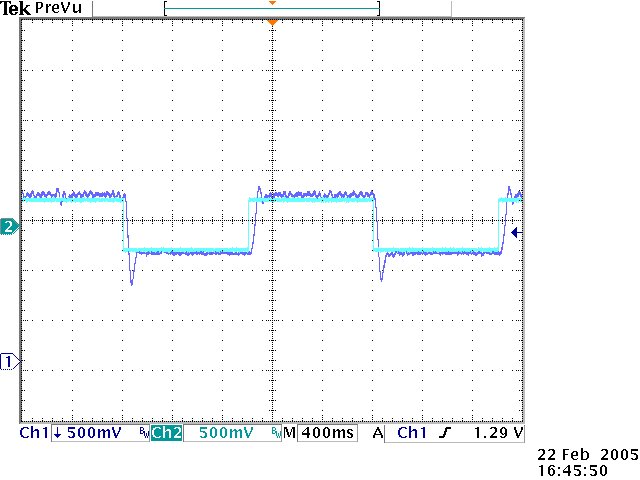
- Ess average = 50mv
- %OS = 18%
- Ts ~60ms
11/13/04
Well, Thursday was the third week of lab. I made my first fuzzy controller that was capable of stabilizing the system. It didn't have zero steady state error, but it was a start. The system had 8 membership functions for error, and 7 for change in error, and a total of 56 rules. It turned out that the system was entirely too complex for the xPC. The initial step time of 1ms didn't work, neither did 10 or 100. A step time of 1s just wouldn't do, so i scrapped that idea. I decided to go with a system with four MFs for error and four for change in error. I haven't gotten to the correction voltage MFs yet, but I believe that there should be as few as possible. I may have to look at several options to make the system faster. I can see if the simpler system works better for starters. Or, I can code the entire system in C or assembly. That would definitely speed the system up. It would also make it esier to incorporate genetic algorithms or neural networks into the system. I'm also going to read my book on fuzzy logic control systems to see if there are any ways it knows of to ascertain the stability of a system or make it faster. I also have to check out those books for the entire semester, or i'll start racking up fines.