Fuzzy Logic Control of a Magnetic Suspension
System Using xPC Target
By Stephen Friederichs
Project Advisors: Dr. Anakwa
and Dr. In Soo Ahn
Introduction
The purpose of this project is to create a fuzzy logic control system to
stabilize a magnetic suspension system. The magnetic suspension system
consists of a magnetic ball and an electromagnet. A photosensor is used to
monitor the position of the ball.
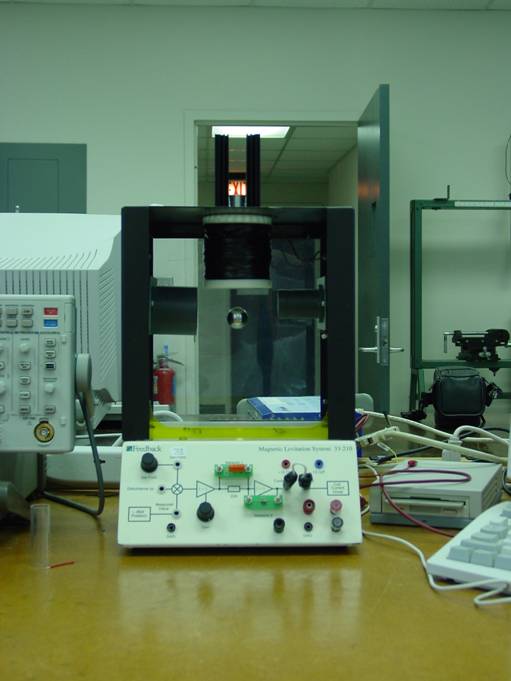
Fig.1 - Magnetic
Suspension System Diagram
The fuzzy logic controller is implemented using Simulink's fuzzy logic
toolbox. The fuzzy logic controller model is compiled into C code on a host
machine and placed on an xPC via ethernet. The xPC is fitted with A/D
converters to digitze the error voltage, and D/A converter to reverse
the process for the correction voltage.
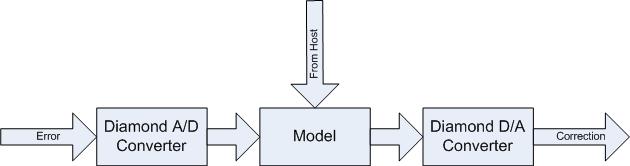
Fig. 2 - xPC Diagram
The xPC is placed in the control system as shown in the control diagram
below.
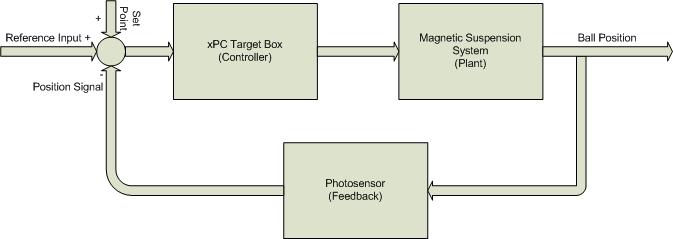
Fig. 3 - Control Block Diagram
Once the system is stabilized, the fuzzy controller will be optimized to
produce zero steady state error, minimize rise and settling time.
The current fuzzy logic controller membership functions and rules can be seen here, along with the response of the system.