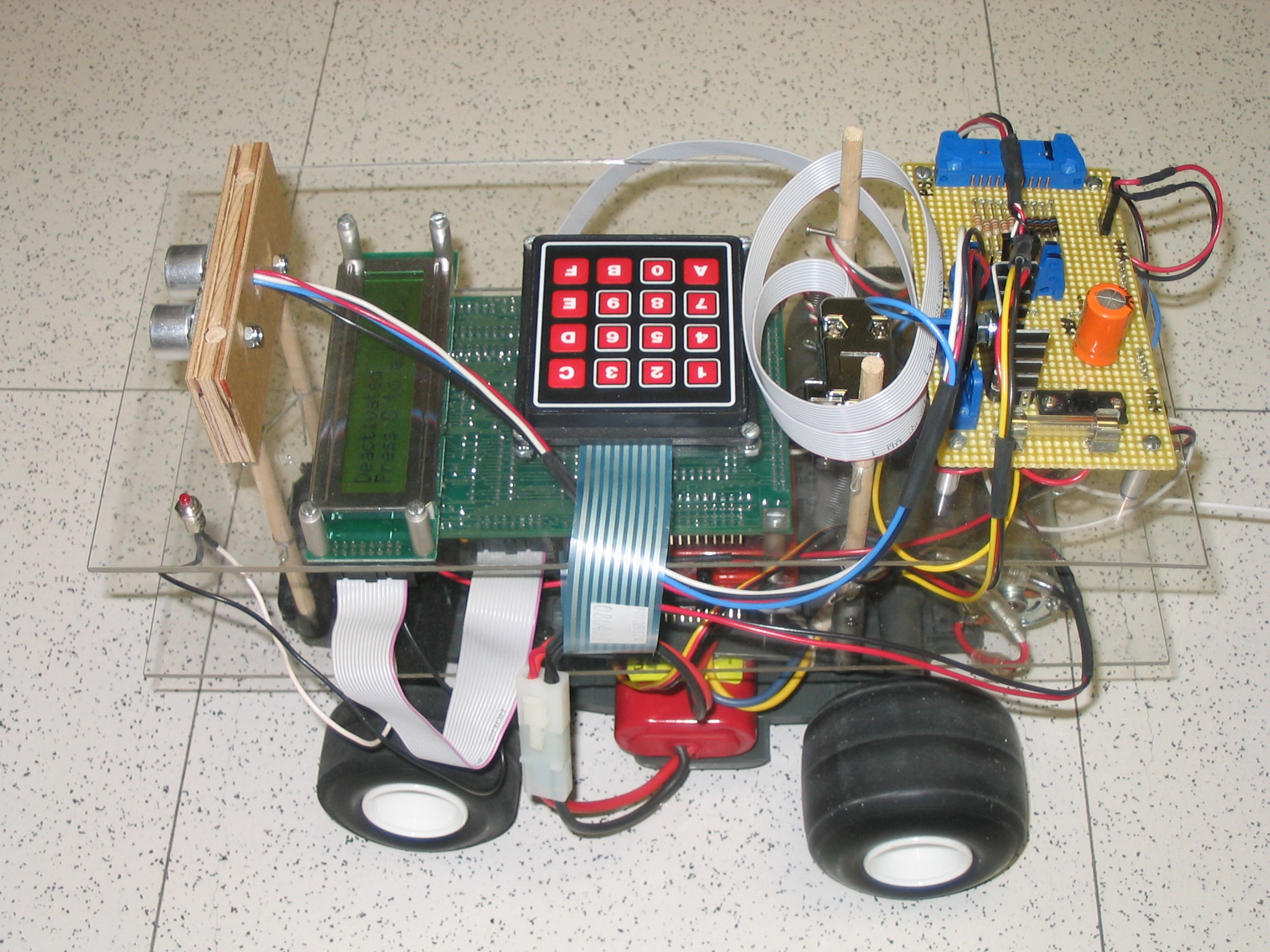
This project consists of a robotic platform that maintains a fixed safety distance behind another moving object using an ultrasonic distance sensor. The system uses an EMAC microcontroller to interface the sensor and control the motor speed. The keypad and LCD provides the user interface, which allows the user to select the safety distance, to set the out of range modes, and to have manual control over the platform.
![]()
E-Mail:
Scott Sendra
Dr. Schertz
Dr. Malinowski
Home Page | Written Documents | Pictures | Videos | Presentations
Page was Last Updated on: 5-14-2004