Datasheet:
Inputs:
The inputs to the system will be in the form of user interaction the a java applet. There will be a slider for rotational velocity and forward velocity. The user will also direct the movements of the robot via the arrow keys which will correspond to move forward, move backward, rotate left and rotate right. In addition if time allows the user will be able to look at a map of the robot environment and click on the location he/she wishes the robot to move to.
Outputs:
The outputs returned to the user will be a NetMeeting video taken from the onboard web cam. The map is again an optional output that may be implemented if time allows. The map would consist of all the obstacles in the environment as well as a marker for the robots position and direction.
User Interface:
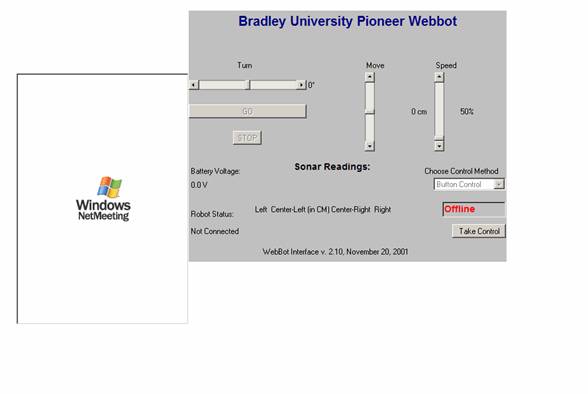
The user interface will be a Java applet. This applet will implement listeners to allow control of the robot with the user’s keyboard. There may be a map of the environment with an indicator of the robots position and heading updated periodically. This interface will also allow the user to adjust the speed of the robot. Video feedback will be provided by NetMeeting. An overhead camera may also be used to help the user navigate without running into obstacles. The existing java applet is shown in figure 1 below. This project will be an enhancement of this user interface
Figure 1
Demonstration
The only foreseeable way to test and confirm the success of this project will be to observe the robot and see that when battery voltage is low it returns to the dock. By hooking up a power supply instead of a battery one may be able to simulate a drained battery condition. The user interface will be demonstrated by normal use of the robot over the internet.