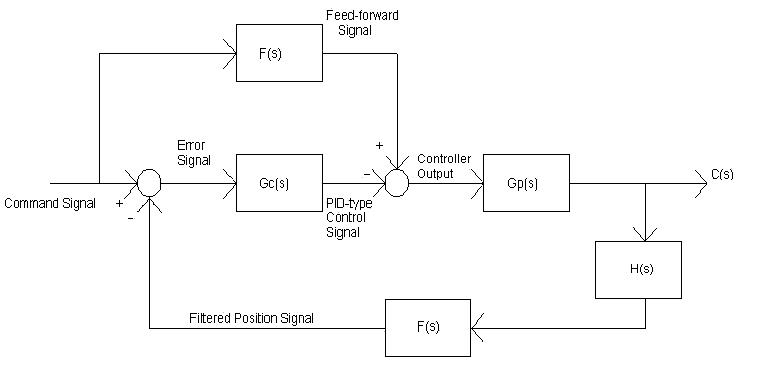
The following signals will be available on the D/A converter output
channels. The expanded control block
diagram is shown in Figure 1.
Command position - Desired robot arm position from joystick or keypad input.
Feed-forward signal - The output signal from the feed-forward compensator.
Error signal - The difference between the command signal and the filtered position signal.
PID-type controller signal
- The output signal from the PID(proportional+integral+derivative)-type
controller.
Controller Output - Signal that drives the robot arm system, connected to power amplifier.
Filtered position signal
- The filtered actual position sensor signal.
Sensor H(s)
- H(s) = 0.028 volts/degree
Filter F(s) - Low pass digital filter.
Plant Gp
- Gp = (29.8e^-0.02s)/( ( s/3.6 + 1 ) (s/3.6 + 1 ))
Dead-zone due to static friction was modeled as 20 ms time delay.
Note
that this is a type 0 system.